はじめに
今年の2月頃に収穫サポートロボット「TANG」の試作機を制作しました。 それから約半年が経過し、ハードウェア・ソフトウェアともにアップデートしたのでその詳細について まとめていこうと思います。 今回は、ハードウェアについて書いていきます。
ハードウェアにおいて改造した箇所
前回までのハードウェアの課題
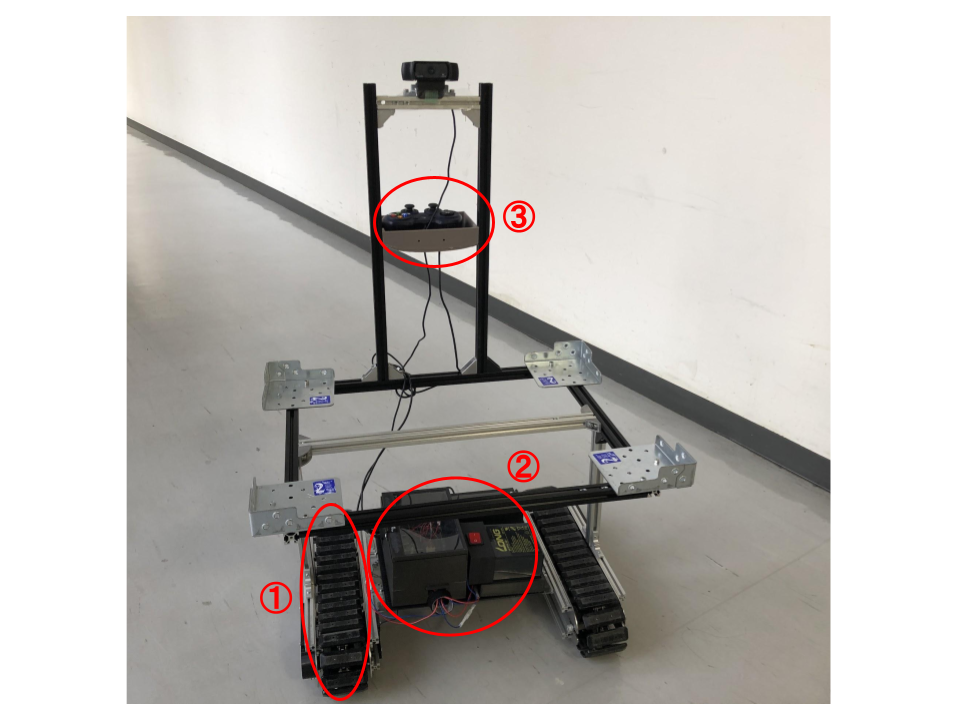
① パワー不足
クローラはCuboRex社のCuGo V1を使用し、最大電圧12Vで駆動するのですが、 傾斜が厳しいみかん収穫現場を走破したり、大量の収穫物を運ぶほどの走破性は まだ持ち合わせていませんでした。また、モータが剥き出しで防塵・防水性能にも まだ課題がありました。農業現場では、濡れた場所を通ったり、急に雨に濡れてしまったり する可能性があるため、防水・防塵対策は必須です。 (このCuGo V1はプレゼント企画で頂きました、この企画がなければ今の自分はないと思うので 本当に感謝しかないです。)
やったぁぁぁ!!!!
— 橋本俊治 (@23232871hashimo) January 23, 2020
嬉しすぎる、早くこれ使って、凸凹のミカン畑を収穫した作物を乗せながら走らせまくりたい。
本当にありがとうございます、大切にします!!😭🙇♂️#cubase pic.twitter.com/D1GVty8Tel
② 防塵・防水対策不足、また耐久性に劣る
モータドライバやRaspberry Pi4を入れるための制御ボックスは、 大学の研究室内にあった3Dプリンタで作りましたが、 それ故にこちらでも防塵・防水・耐久性に問題が有りました。
③ 有線コントローラの線が邪魔
この課題は、そこまで重要ではなかったのですが、ロボットを遠隔操作する際、 有線コントローラ故にロボットのすぐ近くで操作する必要が有りました。 少し離れたところから遠隔操作をやりたいなと考えていました。
その他の課題
- ・ゴツゴツしていて持ち運びにくい
- ・見た目に親しみやすさがない
- ・現在の電池残量がわからない
改造結果
改造した結果は以下のとおりです。 特に変更があったことについて書いていきます。
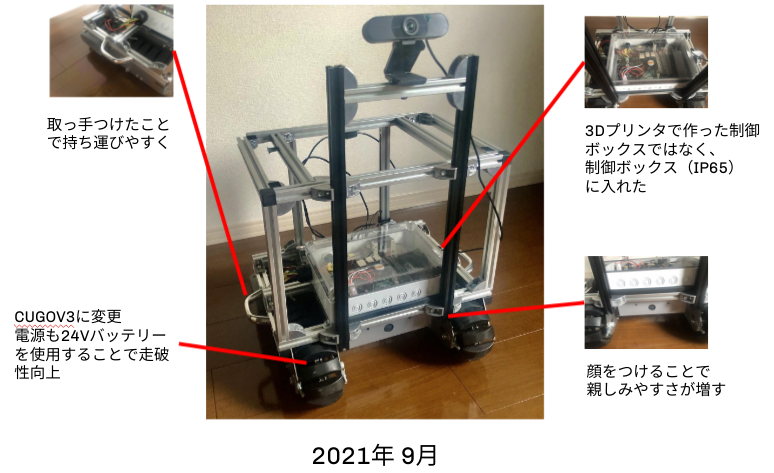
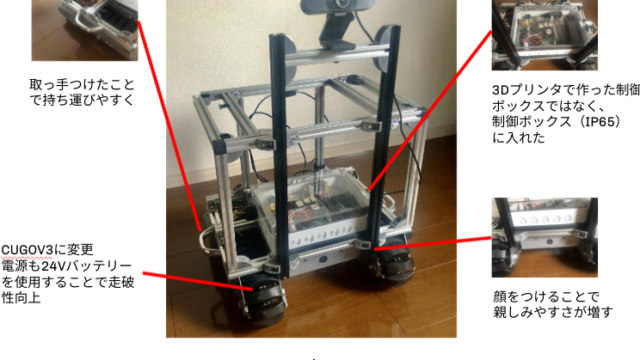
CuGo V1 -> CuGo V3に変更
この改造はとても大きいです。めちゃくちゃ走破性が上がりました。 自分(体重が大体60kg)が乗っても全然動きます。 みかん収穫現場で動かすのがとても楽しみです! CuGo V3のお求めはこちら -> CuboRex
3Dプリンタで作った制御ボックス -> IP65の制御ボックスに変更
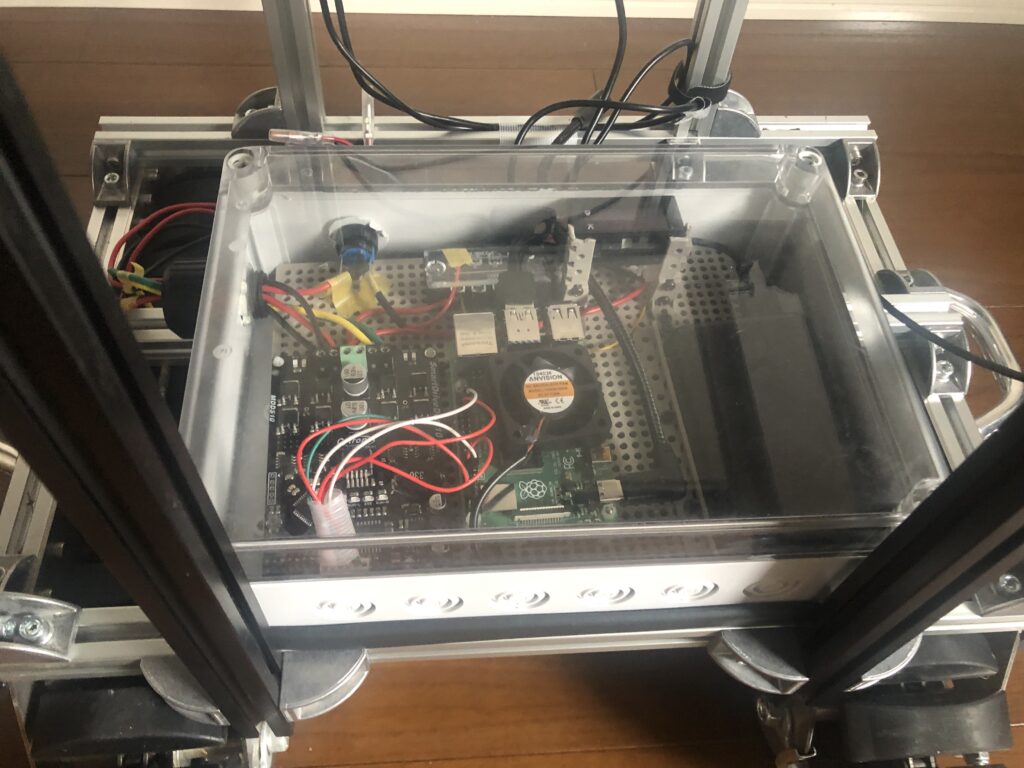
IP65なので、雨が降っても大事な電子部品が濡れる心配はなくなりました! (IP65の意味はこちら) また、細かな部品として、ラズパイに冷却ファンを取り付けたり、電源スイッチを取り付けたり、 現在の電池残量を表示できるようにしました。
愛おしさ?可愛さ?向上

顔を取り付けたことで、以前にもまして愛おしさみたいなのが増した気がします! この顔ですが、実は自分の設計ミスなんです。 この顔の穴は、本来電源供給の配線の通り道であったり、ネジ穴でした。 しかし、いざ組み立ててみると自分の寸法ミスで設計図通りに行かず、なんやかんやあり、 このような形に落ち着きました。 ただ、今はこれでよかったなの大満足しております!
無線コントローラ化
これは、前回使用していたロジクールのゲームパッドをBluetoothで接続できる 無線コントローラ「Logicool G ゲームパッドF710r」に変更しました。
取っ手を取り付け、持ち運びをさらに楽に!
ミスミの取っ手を購入しました。 これは、あるロボット展示場に行った際、移動ロボットにこの取っ手が取り付けられていて、 そのまま採用させていただきました。 この取っ手があるだけですごく持ち運びやすくなり、屋外に運ぶときは非常に助かっています。
まとめ
今回は、ハードウェアを改造したことについて書きました。 個人でやっているので、開発費は少ないので一つ一つの部品を慎重に選びました。 設計もFusion360を使ってミスがないよう頑張りました。 結果一箇所だけ寸法を間違えていて、絶望しましたが無理やり取り付けました笑 次回さらにハードウェアをアップデートするときはこの失敗を活かして 完璧な設計をしたいものですね、、
今回はここまでです。 次回からはソフトウェアの変更点について、新しく勉強したこととともに しばらく書いていこうと思います。 それでは、また!😊